Introduction
Many vision aiding navigation approaches were presented in the last decade as there is a wide range of applications these days (Huang, 2019). Saying that, the classical field of inertial navigation with low-cost inertial sensors as the only source of information is starting getting attention with novel deep learning methods that are involved in it. The main problem of inertial navigation is the drift, which is a key source for errors. More problem involves wrong initialization, wrong modeling of the sensors, and approximation errors.
In this post, we review the integration of deep learning in classical Inertial Navigation System (INS) with Inertial Measurement Units (IMU’s) only to solve part of the problem mentioned above. First, we present some cutting edge architectures for improved speed estimation, noise reduction, zero-velocity detection, and attitude & position prediction. Secondly, the KITTI and OxIOD dataset are discussed. Lastly, schemes of pedestrian inertial navigation with deep learning are presented.
Cutting edge deep learning-based Solutions
One of the main problems in the navigation field is speed estimation. As the estimation becomes accurate it affect also on the position solution. In a work published in 2018 by Cortes et al, a deep learning-based speed estimation approach was suggested. The main idea was to add a speed constrain to the classical Inertial Navigation System (INS). They estimated the speed from the IMU only by using a CNN and then constrained the INS solution by this prediction. Formulating this estimation as a regression deep learning task, where the inputs are the six-channel of the IMU over a few seconds, and the output is the speed, leads to improved trajectory tracking as also motion mode classification.
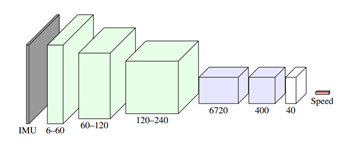
Cortes et al, 2018
The next work I want to present regarding noise reduction. As many low-cost sensors suffer from the high magnitude of noise and characterized by a noise profile, where the noise changes with time, there is a need to filter it. But as these noise profiles are difficult to estimate, using a deep learning-based approach seems to solve this issue. Chen et al (2018) presented a novel deep learning approach to deal with many error sources in the sensor signals. By doing that, the sensors’ signals can be corrected and only then to be used in the navigation scheme. They reported 80% accuracy on the correct identification of the IMU signals. CNN was also used in this work, where it includes 5 convolutional layers and one fully-connected layer.
#tracking #ai #navigation #machine-learning #deep-learning #deep learning