Dominando a retropropagação: um tutorial sobre redes neurais
A retropropagação é um algoritmo chave para treinar redes neurais. Este tutorial explica como funciona, por que é importante e como implementá-lo em Python.
O que é retropropagação?
Introduzido na década de 1970, o algoritmo de retropropagação é o método para ajustar os pesos de uma rede neural em relação à taxa de erro obtida na iteração ou época anterior, e este é um método padrão de treinamento de redes neurais artificiais.
Você pode pensar nisso como um sistema de feedback onde, após cada rodada de treinamento ou “época”, você pode fazer isso. a rede analisa seu desempenho nas tarefas. Ele calcula a diferença entre sua saída e a resposta correta, conhecida como erro. Em seguida, ele ajusta seus parâmetros internos, ou 'pesos,' para reduzir esse erro na próxima vez. Este método é essencial para ajustar a precisão da rede neural e é uma estratégia fundamental para aprender a fazer melhores previsões ou decisões
Como funciona a retropropagação?
Agora que você sabe o que é retropropagação, vamos ver como ela funciona. Abaixo está uma ilustração do algoritmo de retropropagação aplicado a uma rede neural de:
- Duas entradas X1 e X2
- Duas camadas ocultas N1X e N2X, onde X assume os valores 1, 2 e 3
- Uma camada de saída
Ilustração de retropropagação (fonte)
Existem quatro etapas principais no algoritmo de retropropagação:
- Passar para a frente
- Cálculo de erros
- Passe para trás
- Atualização de pesos
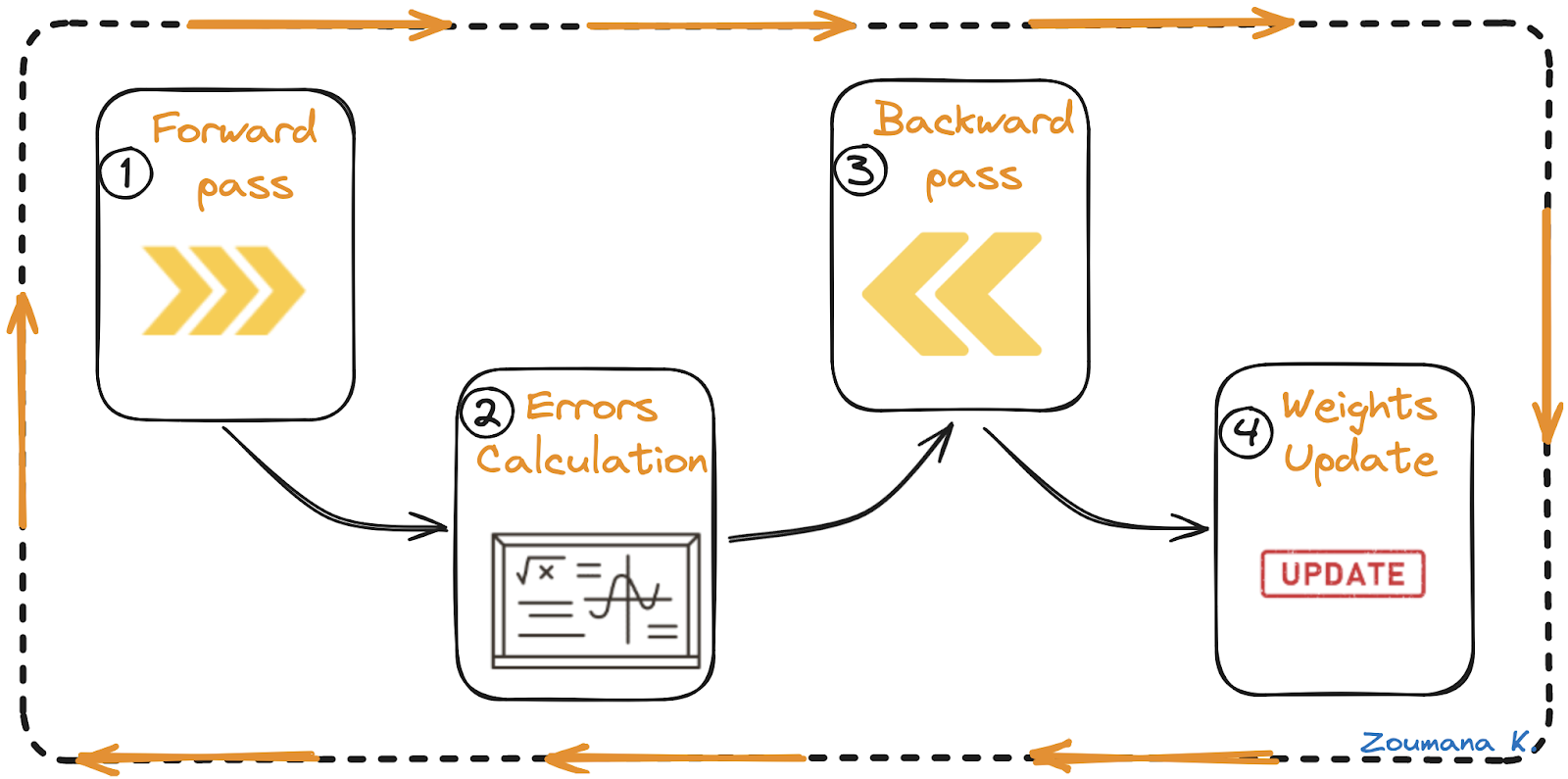
Passagem para frente, cálculo de erro, passagem para trás e atualização de pesos
Vamos entender cada uma dessas etapas da animação acima.
Passar para a frente
Esta é a primeira etapa do processo de retropropagação e é ilustrada abaixo:
- Os dados (entradas X1 e X2) são alimentados na camada de entrada
- Em seguida, cada entrada é multiplicada pelo seu peso correspondente e os resultados são passados para os neurônios N1X e N2X das camadas ocultas.
- Esses neurônios aplicam uma função de ativação às entradas ponderadas que recebem e o resultado passa para a próxima camada.
Cálculo de erros
- O processo continua até que a camada de saída gere a saída final (o/p).
- A saída da rede é então comparada com a verdade fundamental (saída desejada) e a diferença é calculada, resultando em um valor de erro.
Passe para trás
Esta é uma etapa real de retropropagação e não pode ser executada sem as etapas de cálculo de avanço e erro acima. Veja como funciona:
- O valor do erro obtido anteriormente é utilizado para calcular o gradiente da função de perda.
- O gradiente do erro é propagado de volta pela rede, começando da camada de saída até as camadas ocultas.
- À medida que o gradiente de erro se propaga de volta, os pesos (representados pelas linhas que conectam os nós) são atualizados de acordo com sua contribuição para o erro. Isto envolve tirar a derivada do erro em relação a cada peso, o que indica o quanto uma mudança no peso alteraria o erro.
- A taxa de aprendizagem determina o tamanho das atualizações de peso. Uma taxa de aprendizado menor significa que os pesos são atualizados em uma quantidade menor e vice-versa.
Atualização de pesos
- Os pesos são atualizados na direção oposta do gradiente, dando origem ao nome “gradiente descendente”. Tem como objetivo reduzir o erro no próximo passe para frente.
- Este processo de passagem para frente, cálculo de erros, passagem para trás e atualização de pesos continua por várias épocas até que o desempenho da rede atinja um nível satisfatório ou pare de melhorar significativamente.
Vantagens da retropropagação
A retropropagação é uma técnica fundamental no treinamento de redes neurais, amplamente apreciada por sua implementação direta, simplicidade na programação e aplicação versátil em múltiplas arquiteturas de rede.
Nosso tutorial Construindo modelos de redes neurais (NN) em R é um excelente ponto de partida para qualquer pessoa interessada em aprender sobre redes neurais. Ensina como criar um modelo de rede neural em R.
Para programadores Python, o tutorial Tutorial de rede neural recorrente (RNN) fornece um guia completo sobre o modelo de aprendizado profundo RNN mais popular com as mãos. experiência na construção de um preditor de preços de ações MasterCard.
Agora, vamos detalhar cada um dos benefícios mencionados anteriormente:
- Facilidade de implementação: acessível por meio de diversas bibliotecas de aprendizagem profunda, como Pytorch e Keras, facilitando seu uso em diversas aplicações.
- Simplicidade de programação: codificação simplificada com abstração de estrutura, reduzindo a necessidade de matemática complexa.
- Flexibilidade: adaptável a diversas arquiteturas, adequado para um amplo espectro de desafios de IA.
Limitações e Desafios
Apesar do sucesso do algoritmo de retropropagação, ele apresenta limitações, o que pode afetar a eficiência e eficácia do processo de treinamento de uma rede neural. Vamos explorar algumas dessas restrições:
- Qualidade dos dados: a baixa qualidade dos dados, incluindo ruído, incompletude ou parcialidade, pode levar a modelos imprecisos, pois a retropropagação aprende exatamente o que é fornecido.
- Duração do treinamento: a retropropagação geralmente requer muito tempo de treinamento, o que pode ser impraticável ao lidar com redes grandes.
- Complexidade baseada em matriz: as operações de matriz em retropropagação escalam com o tamanho da rede, o que aumenta a demanda computacional e potencialmente ultrapassa os recursos disponíveis.
Implementando retropropagação
Com todos esses insights sobre o algoritmo de retropropagação, é hora de mergulhar em sua aplicação em um cenário do mundo real com a implementação de uma rede neural para reconhecer dígitos manuscritos do conjunto de dados MNIST.
Esta seção cobre todas as etapas, desde a visualização de dados até o treinamento e avaliação do modelo. O código-fonte completo está disponível neste espaço de trabalho do DataCamp.
Sobre o conjunto de dados
O conjunto de dados MNIST é amplamente utilizado na área de reconhecimento de imagens. Consiste em 70.000 imagens em escala de cinza de dígitos manuscritos de 0 a 9, e cada imagem mede 28x28 pixels.
O conjunto de dados está disponível na função mnist do módulo Keras.datasets e é carregado da seguinte forma após a importação da biblioteca mnist:
from keras.datasets import mnist
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()Análise exploratória de dados
A análise exploratória de dados é uma etapa importante antes da construção de qualquer modelo de aprendizado de máquina ou aprendizado profundo porque ajuda a compreender melhor a natureza dos dados em questão e, portanto, orientar na escolha do tipo de modelo a ser usado.
As principais tarefas incluem:
- Identificar o número total de dados no conjunto de dados de treinamento e teste.
- Visualização aleatória de alguns dígitos do conjunto de dados de treinamento.
- Visualize a distribuição dos rótulos do conjunto de dados de treinamento.
O conjunto de dados geral consiste em 70.000 imagens. A divisão típica do conjunto de dados original é fornecida da seguinte forma, e não existe uma regra prática específica para isso:
- 70% ou 80% para o conjunto de dados de treinamento
- 30% ou 20% para o conjunto de dados de teste
Algumas divisões podem até ser de 90% para treinamento e 10% para teste.
Em nosso cenário, os conjuntos de dados de treinamento e teste estão carregados, portanto não há necessidade de divisão. Vamos observar o tamanho desses conjuntos de dados.
print("Training data")
print(f"- X = {train_images.shape}, y = {train_labels.shape}")
print(f"- Hols {train_images.shape[0]/70000* 100}% of the overall data")
print("\n")
print("Testing data")
print(f"- X = {test_images.shape}, y = {test_labels.shape}")
print(f"- Hols {test_images.shape[0]/70000* 100}% of the overall data")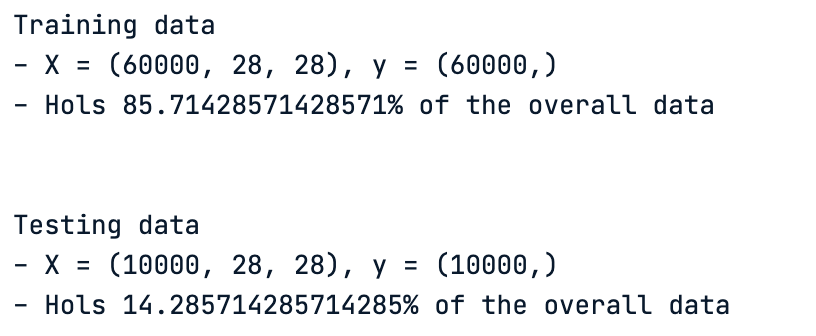
Características dos conjuntos de dados de treinamento e teste
- O conjunto de dados de treinamento possui 60.000 imagens e corresponde a 85,71% do conjunto de dados original.
- O conjunto de dados de teste, por outro lado, possui as 10.000 imagens restantes, portanto 14,28% do conjunto de dados original.
Agora, vamos visualizar alguns dígitos aleatórios. Isso é conseguido com a função auxiliar plot_images, que usa dois parâmetros principais:
- O número de imagens a serem plotadas e
- O conjunto de dados a ser considerado para a visualização
def plot_images(nb_images_to_plot, train_data):
# Generate a list of random indices from the training data
random_indices = random.sample(range(len(train_data)), nb_images_to_plot)
# Plot each image using the random indices
for i, idx in enumerate(random_indices):
plt.subplot(330 + 1 + i)
plt.imshow(train_data[idx], cmap=plt.get_cmap('gray'))
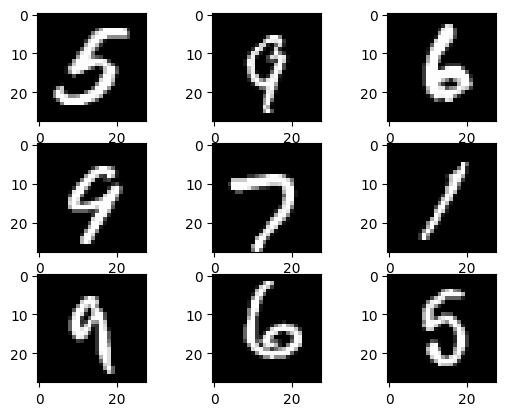
plt.show()Queremos visualizar nove imagens dos dados de treinamento, que correspondem ao seguinte trecho de código:
nb_images_to_plot = 9
plot_images(nb_images_to_plot, train_images)A execução bem-sucedida do código acima gera os nove dígitos a seguir.

Nove imagens aleatórias do conjunto de dados de treinamento
Os seguintes dígitos são exibidos após executar a mesma função pela segunda vez e notamos que eles não são iguais; isso se deve à natureza aleatória da função auxiliar.
Nove imagens aleatórias do conjunto de dados de treinamento após uma segunda execução da função
A tarefa final para a análise de dados é visualizar a distribuição dos rótulos do conjunto de dados de treinamento usando a função auxiliar plot_labels_distribution.
- No eixo X, temos todos os dígitos possíveis
- No eixo Y, temos o número total desses dígitos
import numpy as np
def plot_labels_distribution(data_labels):
counts = np.bincount(data_labels)
plt.style.use('seaborn-dark-palette')
fig, ax = plt.subplots(figsize=(10,5))
ax.bar(range(10), counts, width=0.8, align='center')
ax.set(xticks=range(10), xlim=[-1, 10], title='Training data distribution')
plt.show()A função é aplicada ao conjunto de dados de treinamento provando seus rótulos da seguinte forma:
plot_labels_distribution(train_labels)Abaixo está o resultado, e notamos que todos os dez dígitos estão distribuídos quase uniformemente por todo o conjunto de dados, o que é uma boa notícia, o que significa que nenhuma ação adicional é necessária para equilibrar a distribuição dos rótulos.
Pré-processamento de dados
Os dados do mundo real geralmente requerem algum pré-processamento para torná-los adequados para modelos de treinamento. Existem três tarefas principais de pré-processamento aplicadas às imagens de treinamento e teste:
- Normalização de imagem: consiste em converter todos os valores dos pixels de 0-255 para 0-1. Isto é relevante para uma convergência mais rápida durante o processo de treinamento
- Remodelando imagens: em vez de ter uma matriz quadrada de 28 por 28 para cada imagem, achatamos cada uma em vetores de 784 elementos para torná-la adequada para a rede neural entradas.
- Codificação de rótulos: converte os rótulos em vetores codificados one-hot. Isso evitará os problemas que podemos ter com a hierarquia numérica. Dessa forma, o modelo será tendencioso para dígitos maiores.
A lógica geral de pré-processamento é implementada na função auxiliar preprocess_data abaixo:
from keras.utils import to_categorical
def preprocess_data(data, label,
vector_size,
grayscale_size):
# Normalize to range 0-1
preprocessed_images = data.reshape((data.shape[0],
vector_size)).astype('float32') / grayscale_size
# One-hot encode the labels
encoded_labels = to_categorical(label)
return preprocessed_images, encoded_labelsA função é aplicada aos conjuntos de dados usando estes trechos de código:
# Flattening variable
vector_size = 28 * 28
grayscale_size = 255
train_size = train_images.shape[0]
test_size = test_images.shape[0]
# Preprocessing of the training data
train_images, train_labels = preprocess_data(train_images,
train_labels,
vector_size,
grayscale_size)
# Preprocessing of the testing data
test_images, test_labels = preprocess_data(test_images,
test_labels,
vector_size,
grayscale_size)Agora, vamos observar os valores máximos e mínimos atuais de pixels de ambos os conjuntos de dados:
print("Training data")
print(f"- Maxium Value {train_images.max()} ")
print(f"- Minimum Value {train_images.min()} ")
print("\n")
print("Testing data")
print(f"- Maxium Value {test_images.max()} ")
print(f"- Minimum Value {test_images.min()} ")O resultado do código é fornecido a seguir e notamos que a normalização foi realizada com sucesso.
Valores mínimos e máximos de pixel após normalização
Da mesma forma que os rótulos, finalmente temos uma matriz de uns e zeros, que corresponde aos valores codificados one-hot desses rótulos.
# One hot encoding of the test data labels
test_imagesResultado abaixo:
Uma codificação dinâmica dos rótulos de dados de teste
# One hot encoding of the train data labels
train_labels
Uma codificação dinâmica dos rótulos de dados do trem
Estrutura da rede
Como estamos usando uma tarefa de classificação de imagens, uma rede neural de convolução é mais adaptada para tal cenário. Antes de codificar qualquer coisa, é importante definir a arquitetura do modelo, e esse é o objetivo desta seção.
Para saber mais sobre redes neurais convolucionais, nosso tutorial Uma introdução às redes neurais convolucionais (CNNs) é um excelente recurso inicial. É um guia completo para entender as CNNs, seu impacto na análise de imagens e algumas estratégias importantes para combater o overfitting em aplicações robustas de CNN versus aprendizagem profunda.
A arquitetura para este caso de uso combina diferentes tipos de camadas para uma classificação de imagem eficaz. Abaixo estão os principais componentes do modelo:
- Camada convolucional: comece com uma camada usando um tamanho de filtro pequeno 3x3 e 32 filtros para processar as imagens.
- Camada de pooling máximo: após a camada convolucional, inclua uma camada de pooling máximo para reduzir o tamanho dos mapas de recursos.
- Achatamento: Achate a saída da camada de pooling em um único vetor, preparando-a para o processo de classificação.
- Camada Densa: adicione uma camada densa com 100 nós entre a saída nivelada e a camada final para interpretar os recursos extraídos.
- Camada de saída: Use uma camada de saída com 10 nós, correspondentes às 10 categorias de imagens. Cada nó calcula a probabilidade de uma imagem pertencer a uma dessas categorias.
- Ativação Softmax: na camada de saída, aplique uma função de ativação softmax para classificação multiclasse.
- Função de ativação ReLU: Utilize a função de ativação ReLU (Unidade Linear Retificada) em todas as camadas para processamento não linear.
- Otimizador: use um otimizador estocástico de gradiente descendente com uma taxa de aprendizado de 0,001 e impulso de 0,95 para ajustar o modelo durante o treinamento.
- Função de perda: use a função de perda de entropia cruzada categórica, ideal para tarefas de classificação multiclasse.
- Métrica de Precisão: Foco na métrica de precisão da classificação, considerando a distribuição equilibrada das classes.
Todas essas informações são implementadas na função auxiliar define_network_architecture. Mas antes disso, precisamos importar todas as bibliotecas necessárias:
from keras import models
from keras import layers
from tensorflow.keras.optimizers import SGD
from tensorflow.keras.layers import Conv2D
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import MaxPooling2D
from tensorflow.keras.layers import Dense
from tensorflow.keras.layers import Flatten
from tensorflow.keras.layers import BatchNormalization Aqui está a implementação da função auxiliar.
hidden_units = 256
nb_unique_labels = 10
vector_size = 784 # Assuming a 28x28 input image for example
def define_network_architecture():
network = models.Sequential()
network.add(Dense(vector_size, activation='relu', input_shape=(vector_size,))) # Input layer
network.add(Dense(512, activation='relu')) # Hidden layer
network.add(Dense(nb_unique_labels, activation='softmax'))
return networkA implementação do código-fonte é boa, mas será ainda melhor se pudermos ter uma visualização gráfica da rede, e isso é conseguido usando a plot_model função do keras.utils.vis_utils módulo.
Primeiro, gere a rede a partir da função auxiliar.
network = define_network_architecture()Em seguida, exiba a representação gráfica. Primeiro salvamos o resultado em um arquivo PNG antes de mostrá-lo; isso torna mais fácil compartilhar com outras pessoas.
import keras.utils.vis_utils
from importlib import reload
reload(keras.utils.vis_utils)
from keras.utils.vis_utils import plot_model
import matplotlib.image as mpimg
plot_model(network, to_file='network_architecture.png', show_shapes=True, show_layer_names=True)
img = mpimg.imread('network_architecture.png')
plt.imshow(img)
plt.axis('off')
plt.show()O resultado está apresentado abaixo.
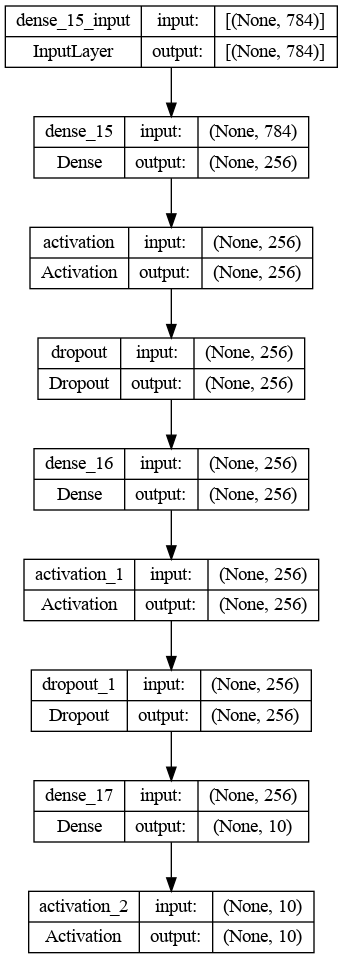
Arquitetura gráfica da rede neural convolucional
Calculando o delta
Antes de mergulharmos no processo de treinamento do modelo, vamos entender como a distribuição do erro delta é calculada usando a arquitetura da rede.
A distribuição delta do erro é a derivada da função de perda em relação à função de ativação de cada nó e indica o quanto a ativação de cada nó contribuiu para o erro final.
A arquitetura acima consiste em três camadas principais:
- Camada de entrada de 784 une correspondente a uma imagem de entrada 28x28
- Camada oculta de 512 une-se à ativação ReLU
- Camada de saída com 10 unidades, que correspondem ao número de rótulos únicos com função de ativação softmax
Agora, vamos prosseguir com o cálculo do erro delta para cada camada.
Camada de saída
Vamos considerar a saída da camada softmax como grande O (O) e os rótulos verdadeiros como S. Ao usar a perda de entropia cruzada δ saída , o erro delta se torna:
δ saída = O - S
Esta fórmula vem do cálculo básico de como a perda de entropia cruzada muda quando a saída softmax muda.
Camada oculta
Para a camada oculta, o erro delta torna-se δ oculto e depende do erro da camada subsequente, que corresponde à camada de saída, e a derivada da função ReLU de ativação.
A derivada do ReLU é 1 para entradas positivas e 0 para entradas negativas, conforme mostrado abaixo.
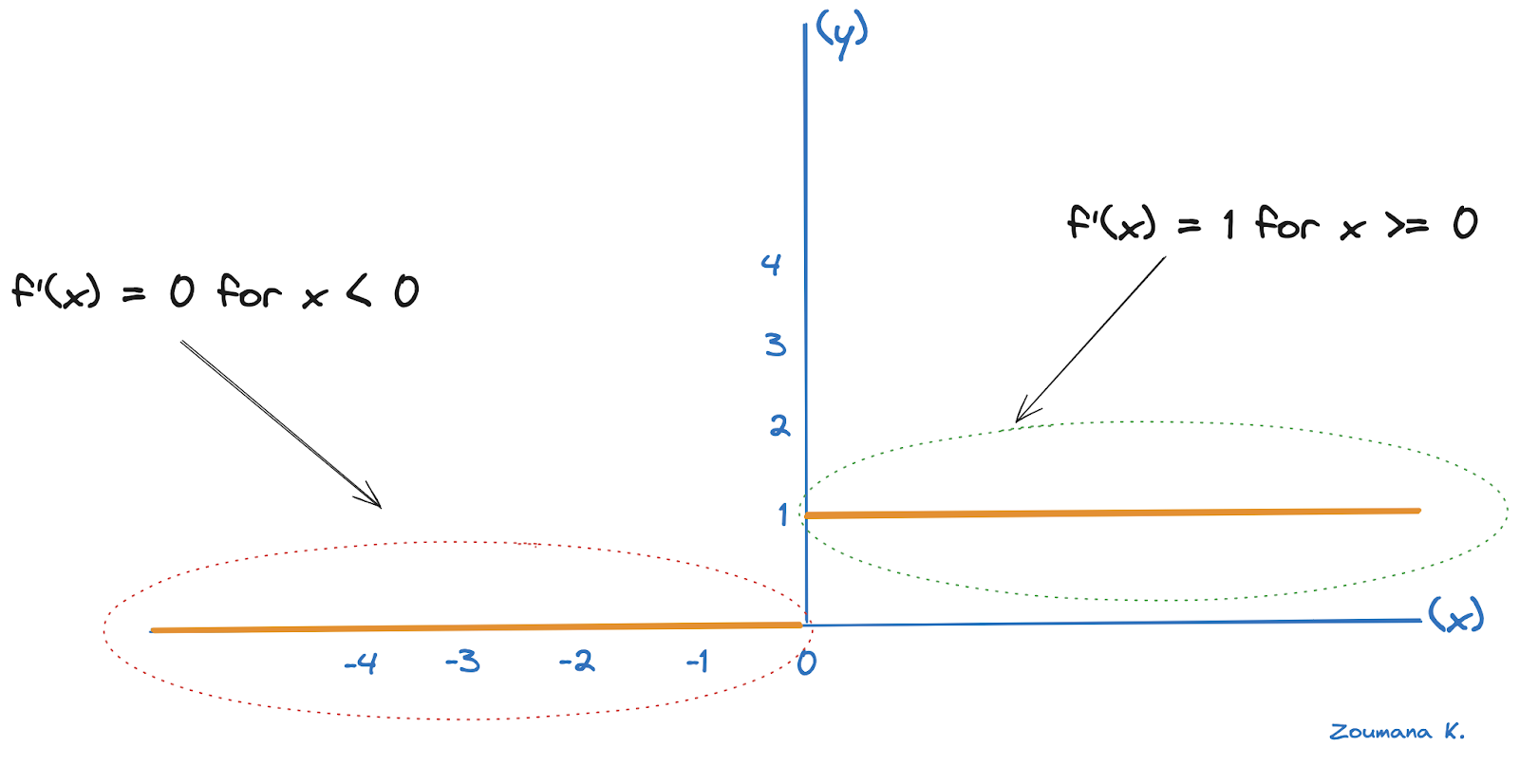
Ilustração derivada do ReLU
Vamos considerar Zoculto como a entrada para a função ReLU na camada oculta e Woutput como os pesos que conectam a camada oculta à camada de saída. O erro delta para a camada oculta, neste caso, torna-se:
δ oculto = (δ saída )ocultoReLU'( Z) ⊙ saídaW.
- O sinal de ponto “.” indica a multiplicação da matriz
- O sinal ⊙ corresponde à multiplicação elemento a elemento
- ReLU'(Zoculto) Corresponde à derivada de ReLU em Zoculto
Camada de entrada
Da mesma forma, se tivéssemos mais camadas ocultas, o processo continuaria de trás para frente com o erro delta de cada camada dependendo do erro delta da camada subsequente e da derivada de sua função de ativação.
Em um cenário mais geral, para qualquer camada k na rede (exceto a camada de saída), a fórmula para cálculo do erro delta é:
δ k = (δ k'(Tk+1) ⊙ fW+1 . k)
- WTk+1 corresponde à transposição da matriz de pesos da próxima camada
- f’ é a derivada da função de ativação para a camada k e
- Zk é a entrada para a função de ativação na camada k
Compilação da rede
Com esse entendimento do cálculo do erro, vamos compilar a rede para otimizar sua estrutura para o processo de treinamento.
Durante a compilação, precisamos fazer várias escolhas críticas:
- Escolha do algoritmo de otimização: envolve a seleção de um algoritmo para otimização de gradiente descendente. Existem várias opções, como Stochastic Gradient Descent (SGD), Adagrad e RMSprop, que são usadas neste artigo.
- Seleção de uma função de perda: A função de perda, também conhecida como função de custo, é uma parte essencial do treinamento. Ele quantifica o desempenho da rede, e a escolha da função de perda deve estar alinhada com a natureza do problema de classificação ou regressão. O foco está na entropia cruzada categórica devido à natureza multiclasse do problema.
- Escolha de uma métrica de desempenho: embora semelhante a uma função de perda, uma métrica de desempenho é usada principalmente para avaliar a eficácia do modelo no conjunto de dados de teste, e estamos usando a precisão
O código para as três opções acima é fornecido abaixo:
network.compile(optimizer='rmsprop',
loss='categorical_crossentropy',
metrics=['accuracy'])Treinamento da rede
Um dos maiores problemas para treinar um modelo é o overfitting, e é crucial monitorar o modelo durante o processo de treinamento para garantir que ele tenha uma melhor generalização, e uma forma de fazer isso é o conceito de parada antecipada.
A lógica completa é ilustrada abaixo:
# Fit the model
batch_size = 256
n_epochs = 15
val_split = 0.2
patience_value = 5
# Fit the model with the callback
history = network.fit(train_images, train_labels, validation_split=val_split,
epochs=n_epochs, batch_size=batch_size)O modelo é treinado por 15 épocas usando um tamanho de lote de 256, e 20% dos dados de treinamento são usados para validação do modelo.
Após treinar o modelo, o histórico de desempenho de treinamento e validação é traçado abaixo.
plt.plot(history.history['accuracy'])
plt.plot(history.history['val_accuracy'])
plt.title('Model accuracy')
plt.ylabel('Accuracy')
plt.xlabel('Epoch')
plt.legend(['Train', 'Validation'], loc='upper left')
plt.show()
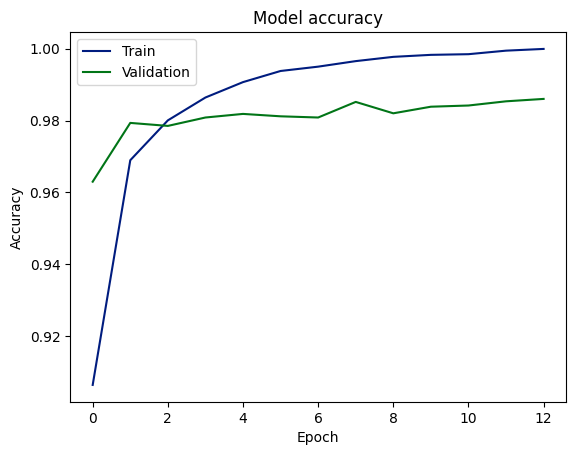
Pontuações de precisão de treinamento e validação
Avaliação em dados de teste
Agora, podemos avaliar o desempenho do modelo nos dados de teste usando a função de avaliação do modelo.
loss, acc = network.evaluate(test_images,
test_labels, batch_size=batch_size)
print("\nTest accuracy: %.1f%%" % (100.0 * acc))
Desempenho do modelo em dados de teste
O gráfico indica que o modelo aprendeu a prever resultados com alta precisão, alcançando cerca de 98% nos conjuntos de dados de validação e teste. Isto sugere uma boa generalização do treinamento para dados não vistos. No entanto, a lacuna entre a precisão do treinamento e da validação pode ser um sinal de sobreajuste, embora a consistência entre a validação e a precisão do teste possa mitigar esta preocupação.
Recomendação
Embora o modelo mostre alta precisão e capacidade de generalização, ainda há espaço para melhorias e abaixo estão algumas etapas práticas para melhorar ainda mais o desempenho.
- Regularização: integre métodos de regularização para reduzir o overfitting.
- Parada antecipada: utilize a parada antecipada durante o treinamento para evitar overfitting.
- Análise de erros: analise previsões incorretas para identificar e corrigir problemas subjacentes.
- Teste de diversidade: teste o modelo em conjuntos de dados variados para confirmar sua robustez.
- Métricas mais amplas: use precisão, recall e pontuação F1 para uma avaliação de desempenho completa, especialmente se os dados estiverem desequilibrados.