YOLOX-ROS Object Detection Package
YOLOX-ROS
YOLOX + ROS2 Foxy (cuda 10.2)
NVIDIA Graphics is required
Japanese Reference (Plan to post):Qiita
Requirements (Python)
- ROS2 Foxy
- CUDA 10.2
- OpenCV 4.5.1
- Python 3.8 (Ubuntu 20.04 Default)
- Torch '1.9.0+cu102 (Install with pytorch)
- cuDNN 7.6.5 (Install with pytorch)
- YOLOX
- TensorRT : is not supported
- WebCamera : v4l2_camera
Requirements (C++)
- C++ is not supported
Installation
Install the dependent packages based on all tutorials.
STEP 1 : CUDA Installation
STEP 2 : YOLOX Quick-start
git clone https://github.com/Megvii-BaseDetection/YOLOX.git
cd YOLOX
pip3 install -U pip && pip3 install -r requirements.txt
pip3 install -v -e . # or python3 setup.py develop
pip3 install cython; pip3 install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
STEP 3 : Install YOLOX-ROS
source /opt/ros/foxy/setup.bash
sudo apt install ros-foxy-v4l2-camera
git clone --recursive https://github.com/Ar-Ray-code/yolox_ros.git ~/ros2_ws/src/yolox_ros/
cd ~/ros2_ws
colcon build --symlink-install # weights files will be installed automatically.
Demo
Connect your web camera.
source ~/ros2_ws/install/setup.bash
# Example 1 : YOLOX-s demo
ros2 launch yolox_ros_py demo_yolox_s.launch.py
# Example 2 : YOLOX-l demo
ros2 launch yolox_ros_py demo_yolox_l.launch.py
Topic
Subscribe
- image_raw (sensor_msgs/Image)
Publish
yolox/image_raw : Resized image (sensor_msgs/Image)
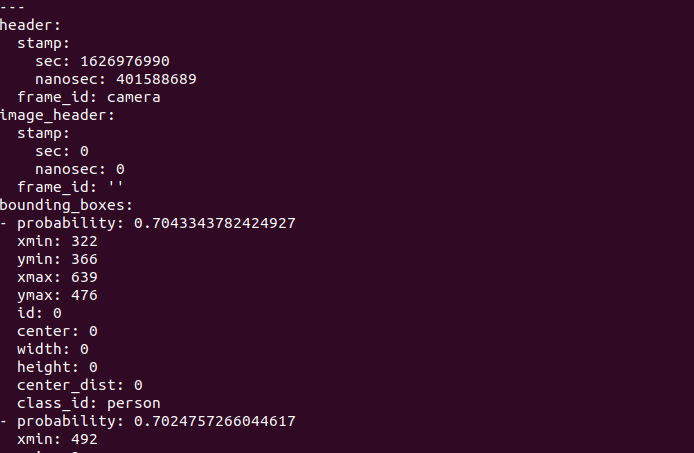
yololx/bounding_boxes : Output BoundingBoxes like darknet_ros_msgs (bboxes_ex_msgs/BoundingBoxes)
※ If you want to use darknet_ros_msgs , replace bboxes_ex_msgs with darknet_ros_msgs.
Parameters : default
- image_size/width: 640
- image_size/height: 480
- yolo_type : 'yolox-s'
- fuse : False
- trt : False
- rank : 0
- ckpt_file : /home/ubuntu/ros2_ws/src/yolox_ros/weights/yolox_s.pth.tar
- conf : 0.3
- nmsthre : 0.65
- img_size : 640
Reference
![]()
@article{yolox2021,
title={YOLOX: Exceeding YOLO Series in 2021},
author={Ge, Zheng and Liu, Songtao and Wang, Feng and Li, Zeming and Sun, Jian},
journal={arXiv preprint arXiv:2107.08430},
year={2021}
}
About writer
- Ar-Ray : Japanese student.
Download Details:
Author: Ar-Ray-code
Source Code: https://github.com/Ar-Ray-code/YOLOX-ROS

1 Likes1.90 GEEK