First Order systems are those whose input-output relationship is a first-order differential equation. These kinds of systems are very important, for example, The coffee machine as a mass heating system.
Therefore, the thing here is that sometimes we need to have the system model in hand to be possible to control them. But…
Sometimes it is difficult to obtain a system’s transfer function analytically. In many cases the system is closed, and one cannot identify its parts.
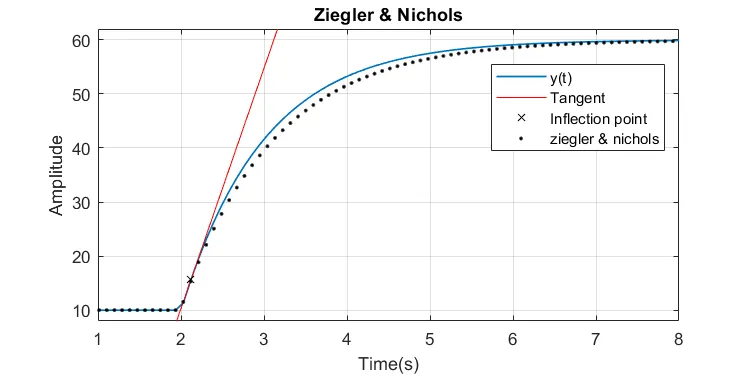
Is there a way we can fix things, and the way is by submitting the system to a step input, we can obtain from the system’s response to this entry important information that is difficult to access otherwise. In other words, the step response can lead us to find some attributes that make it possible to obtain the transfer function of the system.
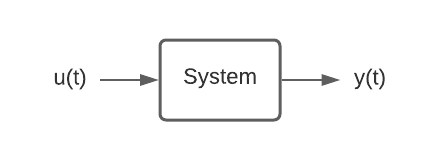
Figure 1: system representation as a box.
Here we have a case to study: Imagine that for a temperature control system, assuming the length of the resistance wire R is negligible concerning the distance L that separates it from the thermometer and that the pipe diameter is small enough. We are talking about the problem illustrated in Figure 2.

Figure 2: System diagram.
If the switch S is closed, the temperature of the liquid will rise immediately. However, until the thermometer as an output signal detects this, the heated liquid must reach the thermometer body, which will happen after a certain time that depends on the flow of the liquid. This time is what is called dead time. So, we are facing a First Order Plus Dead Time (FOPDT) system and for these systems, we have one equation associated with their dynamic response and its equation below.
#data-science #engineering #first-order-systems #electrical-engineering #identification